インサイト
CVPR 2025 Object Instance Detection Challenge: 産業応用に向けた実用AIの進化

Hyun Kim
Co-Founder & CEO | 2025/07/01 | 15 min read
CVPR 2025 Object Instance Detection Challenge: 産業応用に向けた実用AIの進化
コンピュータ・ビジョン分野で最も権威のある会議のひとつであるCVPR(コンピュータ・ビジョンとパターン認識に関する会議)が、2025年に再び世界的な注目を集めようとしている。 その数あるプログラムの中でも、"Visual Perception and Learning in an Open World "ワークショップの一環として開催される "Object Instance Detection Challenge "はひときわ目を引く。
このチャレンジは、学術的な関心を超えて、私たちの日常生活、特にロボット工学においてますます関連性が高まっている中核技術に焦点を当てている。 これは、実世界の産業環境に直接適用できる実用的なAI技術のテストベッドとして機能します。 具体的には、製造、物流、ヘルスケア、セキュリティなど、さまざまな産業でロボット工学とAIを迅速かつ効果的に展開するために必要な主要能力を評価する。
産業用AIに「物体インスタンス検出」が不可欠な理由とは?
産業用途における従来の物体検出の限界
従来の物体検出と物体インスタンス検出の違いの核心は、一般化と特殊化にある。 従来の物体検出が "どんなカップでも "識別することを目的としており、AIの汎化能力に重点を置いているのに対し、インスタンス検出は "その特定のカップ "を見つけることを目的としている。
従来の物体検出は、"椅子"、"コップ"、"本 "など、あらかじめ定義されたカテゴリーに属する物体の位置を特定することに重点を置いていた。 しかし、このアプローチは、実世界の産業環境に適用した場合、明らかに限界がある。

(従来のオブジェクト検出とオブジェクトインスタンス検出の違い)
製造業において、「ボルト」を検出することと、「M8×20mmのステンレス製六角ボルト」を正確に特定することは、まったく別の作業である。 同様に、物流センターでは、"箱 "を探すことと、"アマゾンの注文番号#123456789の特定の配送箱 "を探すことは全く異なります。
インスタンス検出の産業的価値
オブジェクトインスタンス検出(InsDet)は、いくつかの参照画像によって定義された特定のオブジェクトインスタンスを検出することを目的としています。 これはまさに産業環境で必要とされるものである。 このような環境は、予測不可能な条件、不慣れな設定、予期せぬ物体の配置に満ちています。 InsDetは、ロボットがこのようなオープンワールドのシナリオで効果的に動作し、有意義に貢献するための中核となる機能です。
1. 製造業の革新
- 品質管理: 既知の欠陥サンプルと同一の欠陥を持つ製品を自動的に検出し、フィルタリングする。
- 組立ライン: 何十もの似たような部品から、正確な位置に正確な部品を組み立てる。
- 在庫管理: 倉庫に保管されている何千もの部品の中から特定の部品を特定する
2. ロジスティクスの革新
- 自動仕分け: 何万もの荷物の中から特定の顧客の商品を探し出す
- 在庫監査: 数百の棚から特定のブランドやモデルの在庫を正確に確認する。
- ロボットを選ぶ: アマゾンのキバ式倉庫にロボットを動員し、正しい商品だけを正確にピッキングする。
3. ヘルスケアの革新
- 医療機器管理: 数ある病院器具の中から、患者ごとに必要な医療器具を探し出す。
- 薬剤管理: そっくりな薬瓶と正しい処方箋を見分ける
- 手術器具:手術室にある複雑な器具の中から、正確な器具を特定する。
CVPR 2025 Object Instance Detection Challenge: 産業応用のための実世界ベンチマーク
実際の産業環境のシミュレーション
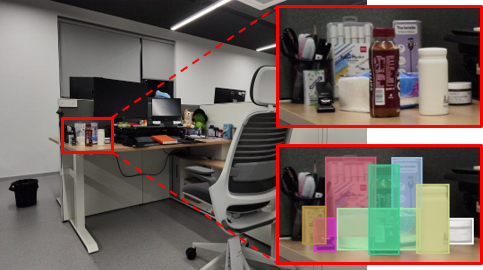
今年のCVPR 2025 Object Instance Detection Challengeは、これまでのInsDet研究よりも大規模で難易度の高いデータセットを特徴としている。 その最大の強みは、屋内ロボットが実際に遭遇する状況をいかにリアルにシミュレートしているかにある。 乱雑で混沌とした屋内空間で、ロボットが離れた場所から特定の物体を識別しなければならないシナリオを再現している。 つまり、このデータセットは現実の産業環境の複雑さと不確実性を反映している。
1. 高解像度製品カタログ・シミュレーション
- 100の異なるオブジェクト・インスタンス: それぞれ3072×3072ピクセルの超高解像度で撮影されている
- 15度間隔で撮影された画像:実際の製品カタログのような360度全方位の製品ビューを提供

(15度間隔の360度画像キャプチャ)
2. リアルな職場環境シミュレーション
- 160枚の実写画像: 6144×8192の解像度で撮影された複雑なシーン
- 散らかったワークスペース: 製造現場、倉庫、店舗に見られるリアルな複雑さ
- 難易度別に分類されている: 実際の産業環境で見られる様々なレベルの複雑さを反映
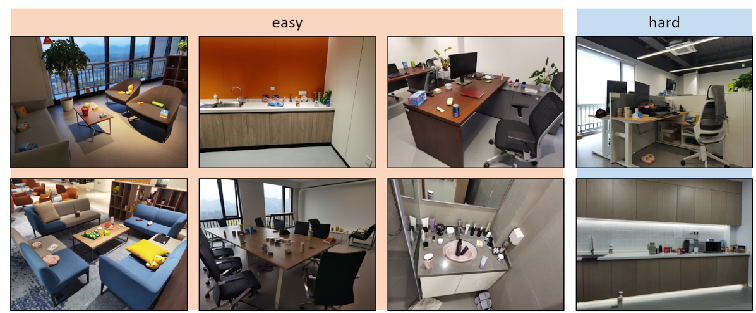
(難易度別に構成されたシーン)
厳格な評価プロトコル
このチャレンジでは、バウンディングボックスの予測に基づいてパフォーマンスを評価する。 評価基準は以下の通り:
- AP(平均精度): 総合検出精度
- 難易度ベースの評価: 簡単なシーンと難しいシーンのパフォーマンスの分析
- サイズに基づく評価: 小、中、大のオブジェクトサイズにおけるパフォーマンスの分析
- AR(平均リコール): 関連するオブジェクトを漏れなく見つける能力
この多面的な評価によって、各モデルの長所と短所を明確に特定することができる。
産業実用性のための厳しい条件
重要な制約: 参加者は実際のテストシーンの画像でモデルを訓練することは許されない。 これは、ロボットが初めて遭遇する環境で訓練された物体を正しく認識しなければならない、実世界のシナリオを反映したものである。
この制約は、モデルの汎化能力を評価する上で重要な要素である。 マルチアングルのプロファイル画像と背景データのみで学習したモデルが、全く新しいテストシーンでどの程度のパフォーマンスを発揮できるかを測定する。
なぜこの条件が産業界にとって重要なのか?
- 新しい職場環境への適応力: 新しい工場や倉庫にロボットを導入するたびに再教育する必要がない。
- 即時配備: 製品カタログのイメージだけで、すぐに現場で使用可能
- コスト効率: サイトごとのデータ収集とトレーニングが不要
インスタンス検出チャレンジの主な技術的課題
少例学習の限界に挑戦する
モデルは、少数の参照画像(24枚のマルチアングルショット)だけを使用して、物体を完璧に検出することを学習しなければならない。 このため、人間の学習方法と同様の高効率な学習能力が要求される。
視点不変性
モデルは、提供された一握りのマルチアングルのプロファイル画像に基づいて、予期しない角度や不慣れな照明条件下から見た場合でも、同じ物体を認識できなければならない。
複雑な環境における堅牢性
乱雑で複雑な実環境でも正確な検出が可能でなければならない。 モデルは、照明の変化や背景の複雑さなどの課題を克服しなければならない。
インスタンス検出は、ロボットを単なるタスク実行者から真のインテリジェント・パートナーへと進化させるための基本技術である。
CVPR 2025で世界の研究者がどのような革新的なアプローチを発表し、それがロボット工学の未来をどのように形作るのか、楽しみにしています。 このような権威ある国際コンペティションで、ドメインに特化したビジョン基盤モデルが検証されることは、次世代産業AI技術における世界的リーダーシップを確保する重要な機会です。 物体インスタンス検出チャレンジにおけるSuperb AIのパフォーマンスに関する最新情報にご期待ください。



Superb AIについて
Superb AIは、エンタープライズ向けのAIトレーニングデータプラットフォームであり、ML(機械学習)チームが組織内でトレーニングデータをより効果的に管理・提供できるよう、データ管理の新しいアプローチを提案しています。2018年に発表されたSuperb AI Suiteは、自動化、コラボレーション、プラグアンドプレイモジュールのユニークな組み合わせを提供し、多くのチームが高品質なトレーニングデータセットを準備する時間を大幅に短縮する手助けをしています。この変革を体験したい方は、今すぐ無料でご登録ください。