技術
Superb AI「独自AI基盤モデル開発プロジェクト」フェーズ2:デジタルツイン資産化

Superb AI Japan
2026/02/23 | 7 min read
![[韓国国家AI基盤モデル・プロジェクト]Superb AI フェーズ2計画 : デジタルツイン資産化](https://cdn.sanity.io/images/31qskqlc/production/142d1dc1b8ffd0027d7c1cad2bd7941d93f3c41e-2000x1125.png?fit=max&auto=format)
フィジカルAIの勝負どころは、ますます明確になっています。鍵はシミュレーションデータです。実世界で必要なシーンをその都度撮影し、検証する方法だけでは、時間とコストの両面で持ちこたえられないためです。
最近NVIDIAは、オープンソースのインタラクティブなワールドモデル「DreamDojo」を発表し、人の一人称視点(エゴセントリック)映像でロボットのワールドモデルを学習させた点を強調しました。これは、Superb AIが先行して採用してきたアプローチが、グローバルの最新技術トレンドと一致していることを示唆しています。
実際にSuperb AIは、独自ファウンデーションモデル(以下、独파모)事業の第1フェーズで、韓国型住環境50カ所のRGB-Dデータ108万フレームを確保し、そのうち30万フレームを学習・検証可能な形に「資産化」して、「実世界データのボトルネック」を突破する土台を作りました。つまり、第1フェーズで収集した一人称視点の実写データは、ワールドモデル(World Model)構築競争においてSuperb AIが先行できる武器であることが証明されたのです。
第2フェーズは、「フレームをさらに集める段階」というよりも、すでに確保した物理データを材料として、ロボットが学習できる仮想物理環境(Digital Twin)を構築する、R&D中心の「資産化」段階です。目標は、空間・行動・オブジェクトの3つの中核デジタル資産を構築し、それによってロボット知能の基盤を築いていくことです。
TL;DR — Superb AI「独自AI基盤モデル開発プロジェクト」フェーズ2の要点
- フェーズ2は、シミュレーション環境のための「材料」を作るR&D段階として定義します。
- フェーズ1で確保した生データを基に、シミュレーターが理解できる3つの中核資産(Space・Action・Object)を構築します。
- 資産をシミュレーター環境へ統合し、エッジケースまで含む合成データ生成パイプラインを実証します。
「実データを“デジタル資産”に変える」
第1フェーズでSuperb AIは、韓国型住環境50カ所で高解像度のRGB-Dデータを確保し、学習可能な形に加工してフィジカルAIの基盤インフラを構築しました。しかし、AIの性能をさらに高めるために実世界データを増やし続けるやり方には限界があります。場所・出演者・演出を毎回組み直して撮影するコストは小さくありませんし、希少な状況(エッジケース)を演出して撮影することは現実的に不可能で、安全面のリスクも大きいからです。調理器具に火が付いたり、火災で煙が発生して視界が確保しにくくなるような突発状況を再現するのは簡単ではありません。
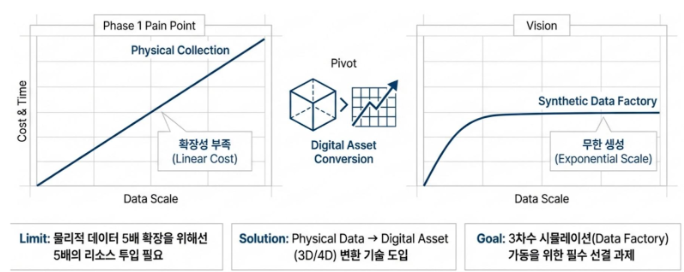
(Superb AIのフェーズ2戦略を説明するサンプル図)
だからこそ、フェーズ2の戦略は明確です。フェーズ2の核心は単なるデータ拡張ではなく、実写で収集したデータを「シミュレーションに投入できるデジタル資産(Digital Asset)」へ変換することです。つまり、現実をそのまま複製するのではなく、シミュレーターが理解し、「操作」できる形に構造化します。
シミュレーション環境では、ドメインランダマイゼーション技術によって、照明、天候、家具配置、カメラアングルなどを数秒で変えられます。その結果、1つの元データから数千、数万の派生バリエーションを生成できます。物理的制約を超えて、ロボット学習に必要なデータの多様性と量を指数関数的に拡張する「データ工場」を稼働させるための、不可欠な前提条件です。
2. コアタスク:シミュレーターのための3つのデジタル資産を構築します。
シミュレーターで意味のある学習を起こすには、単なる画像ではなく、環境(Space)・行動(Action)・対象(Object)のすべてが「資産」として準備されている必要があります。
そのためフェーズ2は、以下の3つを中心に進めます。
- 空間資産:ロボットが動く3D空間(物理属性を含む)です。
- 行動資産:人が行う動作(体型・姿勢を含む)です。
- オブジェクト資産:ロボットが操作できる相互作用可能なオブジェクトです。
この3つが組み合わさることで、シミュレーター上で現実にはない多様な変形シナリオを作り出せます。(照明/配置/動線/物体状態/希少状況など)。
2.1 高精度3D空間資産
目標:韓国型住環境50カ所を、物理的相互作用が可能な3D空間として完全に復元
技術アプローチ:NeRFおよび3D Gaussian Splatting
従来の3Dスキャン方式には、テクスチャがつぶれたり、透明な物体(窓ガラス、鏡など)を正しく表現できなかったりする限界がありました。ロボットが窓ガラスを“空間が抜けている”と誤認して衝突するのを防ぐには、実写レベルの視覚的整合性が不可欠です。
このためSuperb AIは、3D Gaussian Splatting技術を導入します。
- 技術原理:空間を数百万の3Dガウシアン(楕円体)粒子として表現し、現実空間を実写レベルの高画質で再構成します。NeRF(Neural Radiance Fields)の高画質という利点を保ちながら、レンダリング速度が大幅に高速で、リアルタイムのシミュレーション環境に適しています。
- 物理属性の付与:3D Gaussian Splattingによる視覚的再現にとどまらず、別のAIモデルを用いて床や壁面など空間の構造情報を解析します。その解析結果に基づき、床の摩擦係数や壁の剛性など、物理エンジンが計算できる属性値を付与し、ロボットが仮想空間で走行し、衝突テストを行えるように構築します。
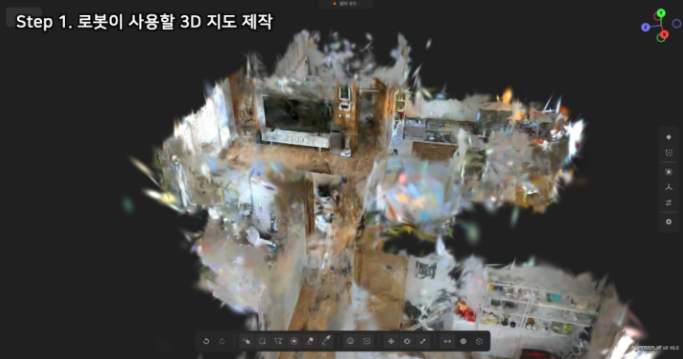
(空間資産の例)
2.2 動的行動資産
目標:皿洗い、掃除など5,000件の家事シナリオを、ロボットが学習可能なモーションデータへ変換
技術アプローチ:SMPL(Skinned Multi-Person Linear Model)
2D映像の中で人が動くピクセルデータだけでは、ロボットに「腕をどう伸ばすべきか」を教えられません。そのためには、人の動きを関節単位の数学的データとして抽出する必要があります。
- SMPLベースのモーションキャプチャ:Superb AIは、映像内の人の体型と姿勢を分離してパラメータ化するSMPLモデルを活用します。物理マーカーを装着することなく、映像解析だけで関節回転値と身体変形を3次元空間上で推定します。
- モーションリターゲティング:抽出した人の動作データは、SMPL(Skinned Multi-Person Linear)形式として資産化します。このデータはシミュレーター内でさまざまな体型のデジタルヒューマンに適用でき、ヒューマノイドロボットが人の動作を模倣学習するための中核教材として使われます。ロボットに適用するには、ロボット固有の関節構造に合わせてモーションデータを変換する、別途リターゲティング(Retargeting)工程が必要です。
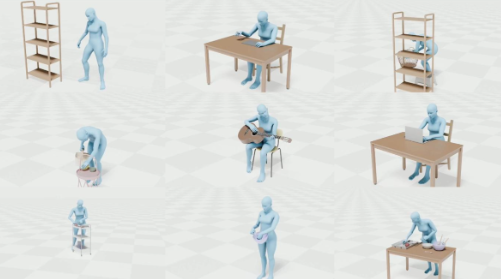
(行動資産の例)
2.3 知能的オブジェクト資産
目標:家事ロボットが頻繁に使用すると見込まれる物品10,000件を、相互作用可能なオブジェクトとして資産化
技術アプローチ:高精度セグメンテーションと関節(可動部)モデリング
シミュレーション内の電子レンジが、単なる「電子レンジの絵が描かれた箱」であれば、ロボットは扉を開ける練習ができません。オブジェクト資産化の核心は「相互作用性」です。
- オブジェクト分離:SAM(Segment Anything Model)などの技術を用い、ピクセル単位で高精度にオブジェクトを分離します。特に、重なり合う物体や複雑な背景の中でも、IoU(Intersection over Union)0.7以上の精度を目標とします。
- 関節モデリング:引き出し、冷蔵庫の扉、はさみのように可動部を持つオブジェクトには、ヒンジ情報と可動範囲を設定します。これによりロボットは仮想空間で、引き出しを引く、はさみを閉じるといった操作訓練を実施できます。
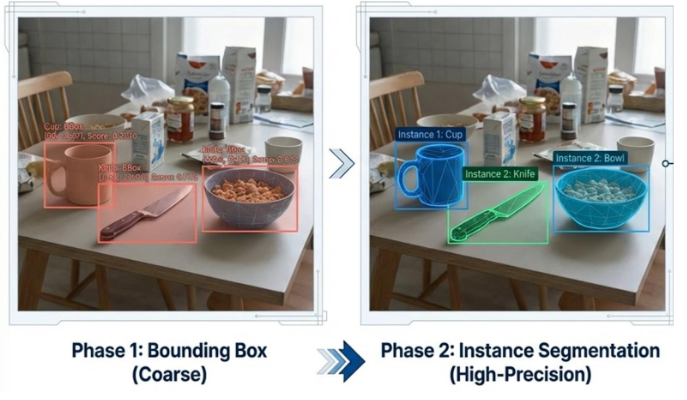
(家事関連物品のオブジェクト資産化)
3. 技術的実行方法論:合成データ工場を稼働
構築した3つの資産は、NVIDIA Isaac Simベースのパイプラインで統合され、ここで「合成データ」が大量生産されます。これが、フェーズ2が単なるデータ加工ではなく「技術的R&D」課題として定義される理由です。
3.1 合成データ生成パイプライン
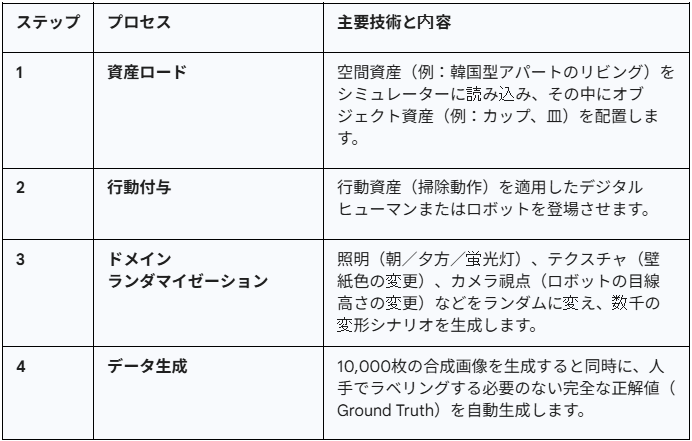
3.2 Sim-to-Realギャップの解消
合成データの最大の課題は、「仮想環境で学習したロボットが現実でもうまく動作するのか」というSim-to-Realギャップです。Superb AIはこれを検証するため、SSIM(Structural Similarity Index Measure)指標を用いて合成画像と実写画像の視覚的整合性を検証します。また、物理エンジンの衝突誤差を10%以内に管理する厳格な品質基準も策定しました。
4. 結論:韓国ロボット生態系の礎を築き、ワールドモデルをリードします。
Superb AIの「独自AI基盤モデル開発プロジェクト」フェーズ2の目標は、「私たちだけが使うデータ」ではありません。本事業を通じてフィジカルAIデータ確保の時間・コスト制約を緩和し、高品質な3D・4Dデータセットの公開によって、国内のロボット・AI生態系を活性化する基盤を整えます。
また、資産化したSpace・Action・Objectをシミュレーションへ統合し、エッジケースまで反映したSim-to-Real体制を段階的に実装します。
NVIDIAが一人称視点データを活用したロボットのワールドモデルで技術の新たな地平を切り開いたように、Superb AIもまた、独自の高品質な一人称ビューの生データと3つのデジタル資産化によって、汎用ワールドモデル構築の土台を着実に固めています。この構造が完成すれば、ロボットはより多くの家を撮影したデータで学ぶのではなく、より多くの状況を「生成して」学ぶようになります。
そのときからフィジカルAIは、現実を追いかける技術ではなく、現実を先回りして準備する技術になります。Superb AIは「独自AI基盤モデル開発プロジェクト」フェーズ2を成功裏に完遂し、データ量の拡大を超えた質的イノベーションを実現し、韓国がグローバルのフィジカルAIおよびワールドモデル市場でファーストムーバー(First Mover)へ飛躍することに貢献します。

Superb AIについて
Superb AIは、エンタープライズ向けのAIトレーニングデータプラットフォームであり、ML(機械学習)チームが組織内でトレーニングデータをより効果的に管理・提供できるよう、データ管理の新しいアプローチを提案しています。2018年に発表されたSuperb AI Suiteは、自動化、コラボレーション、プラグアンドプレイモジュールのユニークな組み合わせを提供し、多くのチームが高品質なトレーニングデータセットを準備する時間を大幅に短縮する手助けをしています。この変革を体験したい方は、今すぐ無料でご登録ください。